Main:
Parts/Info
Galleries:
Other:
| The Walkman page aka Vbug 1.5 |
|
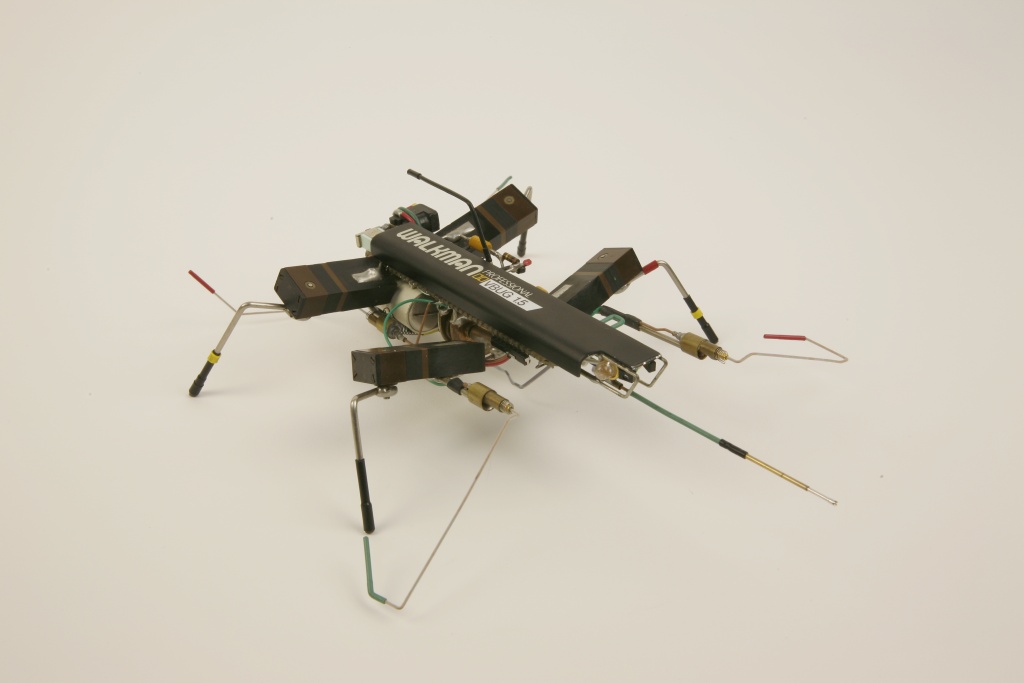
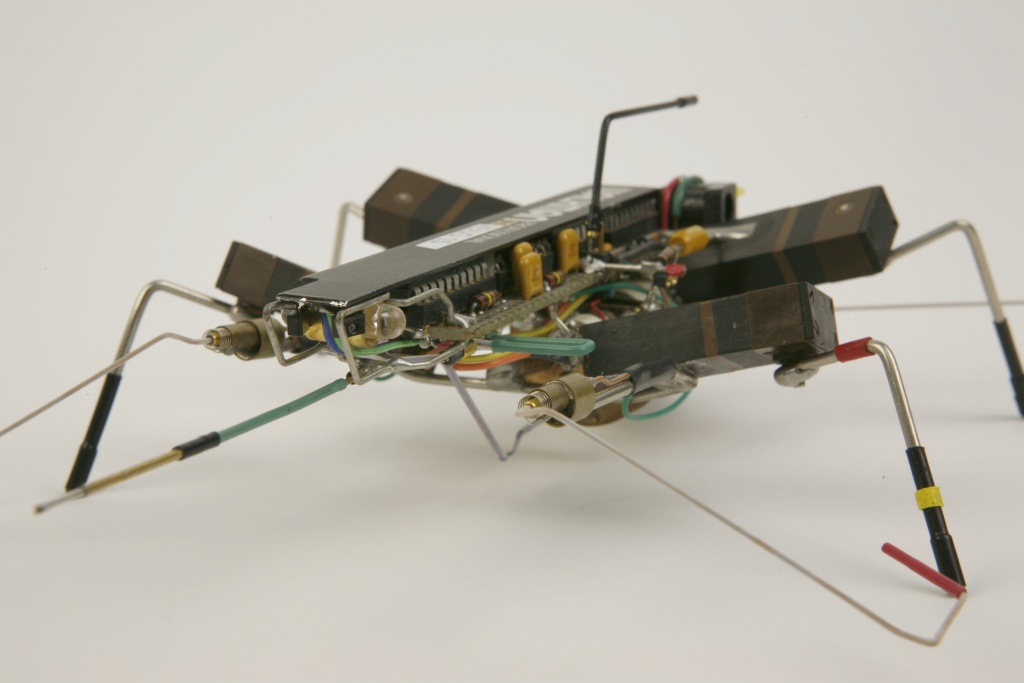
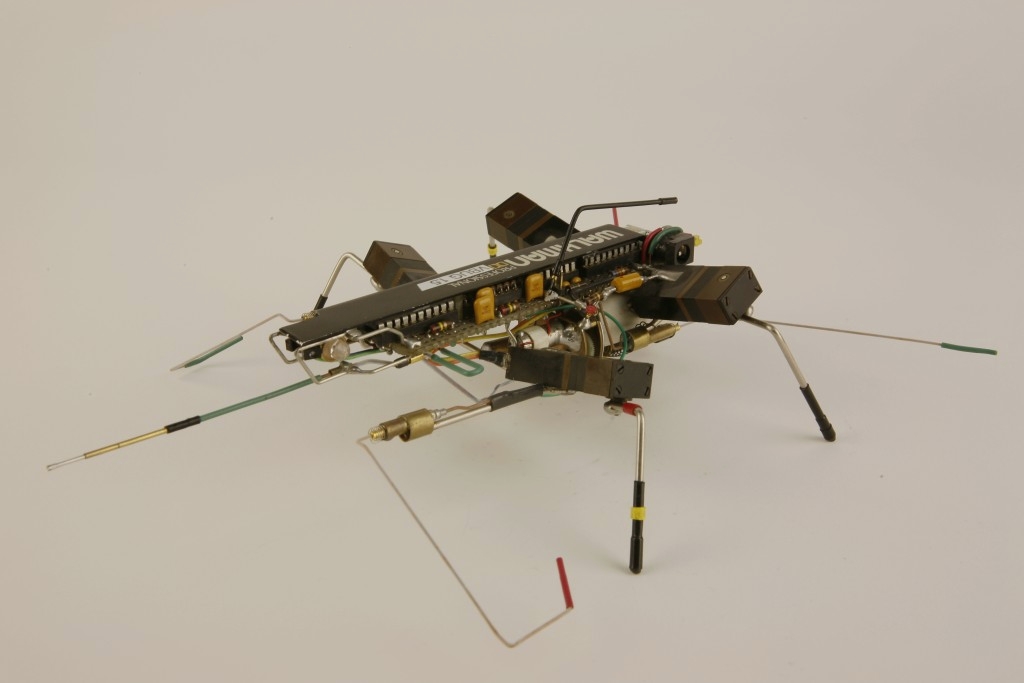
Name: Vbug 1.5 aka. "Walkman" Designer: Mark W. Tilden Build Date: Dec 15, 1993 - April 1, 1994 (completion) About: - 4 x Escap MU915L gearboxes (151:1 gear ratio) for each leg. - 1 x Motorola Phone vibration motor driving a brass "oven timer" mechanism. - 3 chip analog controller using 4 Nv "Microcore" in a 74HC14 plus 2 x 74ALS240s as motor drivers and multiplexers. - All extra analog components salvaged from Sony Professional Walkmans. - 730grams (including rechargeable NICADs) - 4.8v operation with over 2 hours of runtime from a single charge.
Abilities: - Could walk over any complex surface equal to it's own resting height. - Forward, backward, left-right turning and diagonal travel. - 5 multi-directional wire touch sensors (4 corners and 1 forward) and two phototropic eyes for light following ability. - Nv "Necklass Function" processes could fall into 3 distinct patterns allowing it to rest, walk, and "dig". - Unusual ability to extract itself from difficulty using unconstrained pivot limbs. - Asymmetric control signals even mimicked a form of "learning ability" due to motor-load variations affecting process refractions in beneficial ways.
History: In Mark Tilden's first year as a physicist at Los Alamos National Laboratory he took advantage of formal time to apply his theories of minimalist biomorphic design, building a range of experimental insectoid robot platforms for scientific study. Following a New York Times interview in 1993 (covering Tilden's fame as organizer of the BEAM Robot Games that year), the reporter mentioned that the Times had dozens of broken Sony "Walkman Professionals" used to destruction, and they'd be glad to send them along. About a dozen did show up which Tilden carefully dissected and used in a variety of first-generation research walkers. Walkman 1.5 was the most successful and certainly the most famous of the twelve-robot line, many of which were built concurrently over a 2 year period.
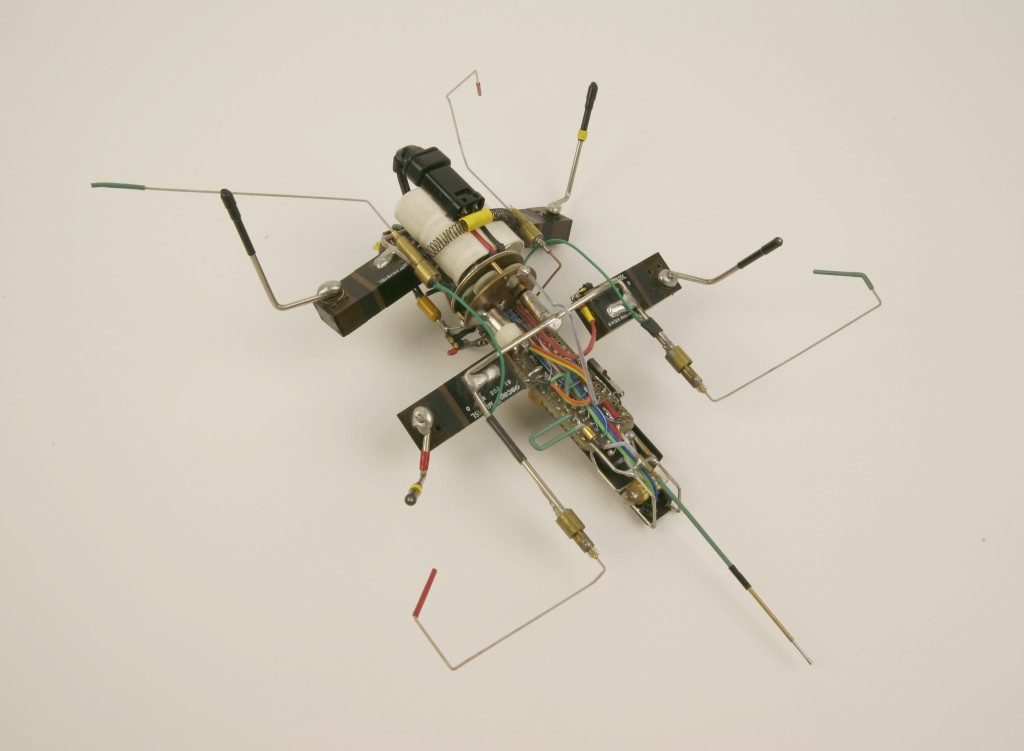
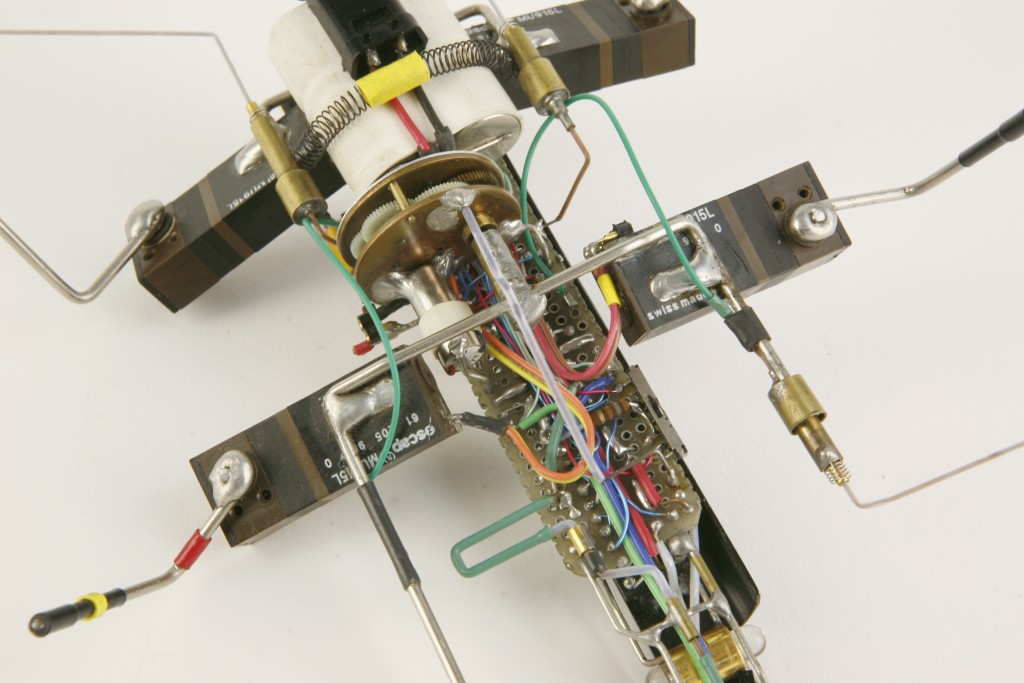
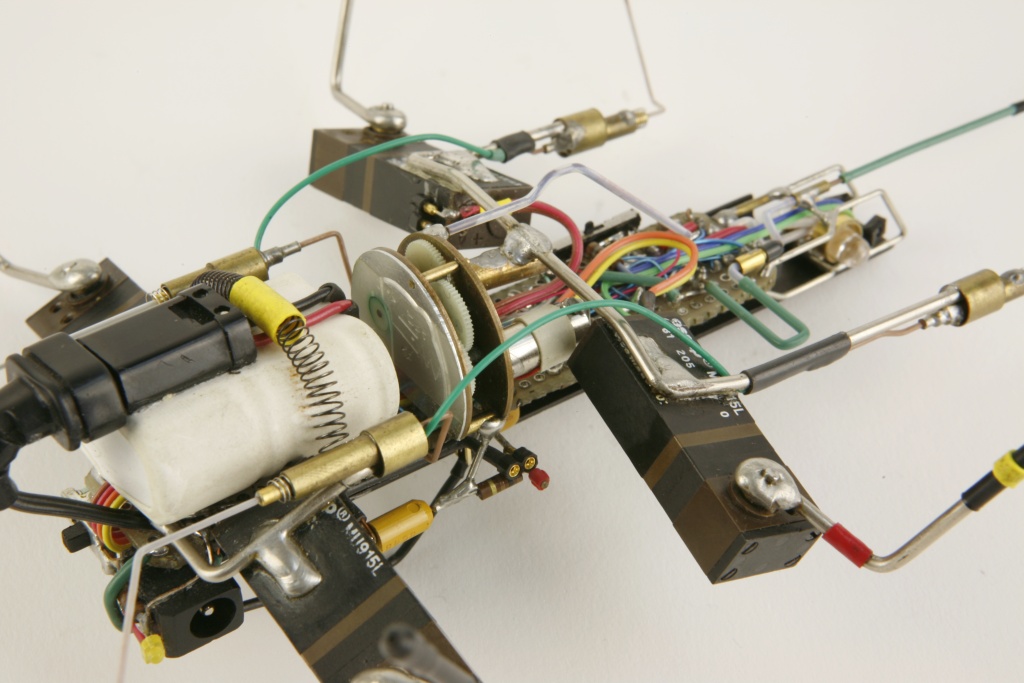
Knowing his Nervous Network control theory was robust enough to work anything, Tilden built his robots only from discarded components and in non-uniform ways to prove the point, and Walkman was no exception. The robot was built from a vast array of diverse components from the famous "oven timer" gearbox, Motorola phone vibrating motors, Walkman gearboxes and analog electronics, gold PCB test pins, and parts from old laser-printer cartridges, even the PCB the circuit was built on was scavenged from an 1980s Sun Microsystems video board. Indeed, there was nothing in the robot (as in the entire VBug series) that was not second hand. The entire robot was "wire-framed", with solder as the primary structural element holding it together. Walkman and his brethren even garnered a Guinness World Record for "World's Least Expensive Research Robot" from 1997 to 2001.
Walkman standing on one of the extra walkmans donated by the reporters at the New York Times. The first Walkmans donated were used to build the robot itself.
Despite appearances nothing on Walkman was decorative -- sensors were all shaped to optimize object detection as the asymmetric robot explored, gold video-cable pins were used for contacts to optimize lifetime, even the aluminum backplate was used as a heat sink for the 240 bus driver chips (pushed well beyond their ratings as both motor drivers and multiplexers).
Walkman turned out to be the darling of Tilden and Hasslachers international lecture circuit from 1994 to 1999, showing how emergent competence could rise from simplicity (a stalwart of the Artificial Life movement during that time). During a lecture at the MIT Robotics Laboratory in 1995 the famous Marvin Minsky, after examining Walkman, put it down and exclaimed "I don't know where you've hidden the wireless modem link to the computer that's actually controlling this thing, but I know it has to be in there somewhere." Despite a long emotionally charged discussion afterwards, no opinions were changed despite experimental evidence and repeated tests.
In 1997 Walkman was taken to Washington DC for study and presentation by various science agencies to drum up funding interest in Biomorphic Robotics -- a "new form" of robotics that appeared capable but significantly less expensive than conventional methods. It was during this time that Walkman was found missing after a prominent presentation to congress having been lifted from a Capitol Hill exibition table without a trace. Walkman was gone for over 15 months until the fall of 1998 when it was returned to Tilden by a new DARPA Project manager who had "found it" along with various other Tilden robots in an Arlington Virginia government office. Several other robots were also returned that had been delivered to diverse sponsors over the years (of the original twelve VBug robots built, seven are still unaccounted for).
Walkman was very animated and quite enigmatic to watch. It showed an incredible exploration competence despite simplicity and even a demonstrable memory effect, being able to extract itself from any leg trap again using the same method it would "find" after only 30 seconds of flailing, and again almost immediately. Though there was much study and papers written on Walkmans abilities, they were never properly described or explained, and Walkman's abilities remain a mystery until this day.
Walkman's Vcc phase space sampled during 5000 steps.
Walkman's Nv Symbol lexicon layout showing topological simplicity.
The original Walkman 1.5 schematic showing the chips in the actual positions and their exact wiring allocations. The bottom 4 resistors in the middle set the tuning for the very asymmetric structure and took Tilden well over a day to optimize.
|